Your Step-by-Step Manual: How to Reload Chunks in Minecraft
In the sprawling universe of Minecraft, where landscapes are crafted, secrets are unearthed, and adventures unfold, lies the enigmatic concept of chunk reloads. These arcane maneuvers hold the power to reshape the terrain, address glitches, and breathe new life into your world. This guide serves as your portal to the art of chunk reloads, providing […]
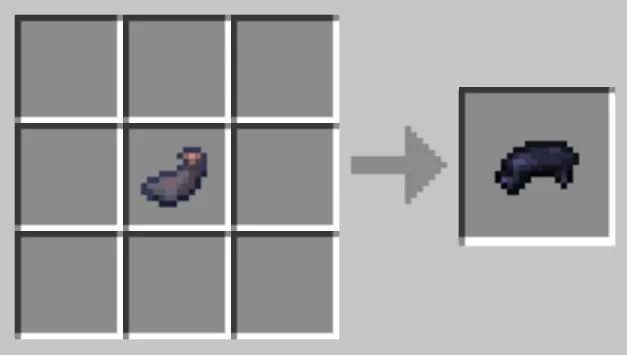
What to Feed Fish in Minecraft
In Minecraft, you’re the architect, the explorer, and the adventurer, shaping the landscape, building structures, and navigating through a vast world. The game’s ecosystem is a masterful blend of vibrant landscapes, diverse biomes, and an array of passive and hostile creatures. One fascinating aspect of this ecosystem is the aquatic life, where various fish species […]

Unraveling How to Put Out Campfire Minecraft
In the captivating world of Minecraft, where creativity knows no bounds, the dancing flames of a campfire often hold both functional and aesthetic appeal. But what happens when you need to tame these fiery elements and extinguish the warmth they emit? This article beckons you to embrace the art of fire manipulation as we unveil […]
Cheats for Minecraft
Minecraft cheats have been created specifically so that the player can overcome difficulties and any obstacles that may arise in the game.











Popular